Detecção de várias cores em tempo real usando Python-OpenCV
Para que um robô visualize o ambiente, junto com a detecção do objeto, a detecção de sua cor em tempo real também é muito importante.
Por que isso é importante? : Alguns aplicativos do mundo real
- Em carro com direção automática, para detectar os sinais de trânsito.
- A detecção de várias cores é usada em alguns robôs industriais, para realizar tarefas de pick-and-place na separação de objetos de cores diferentes.
Esta é uma implementação de detecção de várias cores (aqui, apenas as cores vermelho , verde e azul foram consideradas) em tempo real usando a linguagem de programação Python.
Bibliotecas Python usadas:
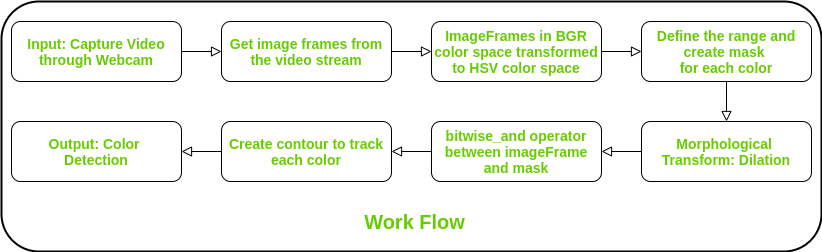
Descrição do Fluxo de Trabalho:
-
Etapa 1: Entrada: Capture vídeo pela webcam.
Etapa 2: Leia o fluxo de vídeo em quadros de imagem.
Etapa 3: Converta o imageFrame em BGR (espaço de cores RGB representado como três matrizes de vermelho, verde e azul com valores inteiros de 0 a 255) para espaço de cores HSV (hue-saturation-value). Matiz descreve uma cor em termos de saturação , representa a quantidade de cor cinza nessa cor e o valor descreve o brilho ou intensidade da cor. Isso pode ser representado como três matrizes no intervalo de 0-179, 0-255 e 0-255, respectivamente.
Etapa 4: defina o intervalo de cada cor e crie a máscara correspondente.
Etapa 5:Transformação Morfológica: Dilatação, para remover ruídos das imagens.
Etapa 6: bitwise_and entre o quadro da imagem e a máscara é realizada para detectar especificamente aquela cor particular e separar outras.
Etapa 7: Crie um contorno para as cores individuais para exibir a região colorida detectada de maneira distinta.
Etapa 8: Saída: Detecção das cores em tempo real.
Abaixo está a implementação.
importnumpy as npimportcv2webcam=cv2.VideoCapture(0)while(1):_, imageFrame=webcam.read()hsvFrame=cv2.cvtColor(imageFrame, cv2.COLOR_BGR2HSV)red_lower=np.array([136,87,111], np.uint8)red_upper=np.array([180,255,255], np.uint8)red_mask=cv2.inRange(hsvFrame, red_lower, red_upper)green_lower=np.array([25,52,72], np.uint8)green_upper=np.array([102,255,255], np.uint8)green_mask=cv2.inRange(hsvFrame, green_lower, green_upper)blue_lower=np.array([94,80,2], np.uint8)blue_upper=np.array([120,255,255], np.uint8)blue_mask=cv2.inRange(hsvFrame, blue_lower, blue_upper)kernal=np.ones((5,5),"uint8")red_mask=cv2.dilate(red_mask, kernal)res_red=cv2.bitwise_and(imageFrame, imageFrame,mask=red_mask)green_mask=cv2.dilate(green_mask, kernal)res_green=cv2.bitwise_and(imageFrame, imageFrame,mask=green_mask)blue_mask=cv2.dilate(blue_mask, kernal)res_blue=cv2.bitwise_and(imageFrame, imageFrame,mask=blue_mask)contours, hierarchy=cv2.findContours(red_mask,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)forpic, contourinenumerate(contours):area=cv2.contourArea(contour)if(area >300):x, y, w, h=cv2.boundingRect(contour)imageFrame=cv2.rectangle(imageFrame, (x, y),(x+w, y+h),(0,0,255),2)cv2.putText(imageFrame,"Red Colour", (x, y),cv2.FONT_HERSHEY_SIMPLEX,1.0,(0,0,255))contours, hierarchy=cv2.findContours(green_mask,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)forpic, contourinenumerate(contours):area=cv2.contourArea(contour)if(area >300):x, y, w, h=cv2.boundingRect(contour)imageFrame=cv2.rectangle(imageFrame, (x, y),(x+w, y+h),(0,255,0),2)cv2.putText(imageFrame,"Green Colour", (x, y),cv2.FONT_HERSHEY_SIMPLEX,1.0, (0,255,0))contours, hierarchy=cv2.findContours(blue_mask,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)forpic, contourinenumerate(contours):area=cv2.contourArea(contour)if(area >300):x, y, w, h=cv2.boundingRect(contour)imageFrame=cv2.rectangle(imageFrame, (x, y),(x+w, y+h),(255,0,0),2)cv2.putText(imageFrame,"Blue Colour", (x, y),cv2.FONT_HERSHEY_SIMPLEX,1.0, (255,0,0))cv2.imshow("Multiple Color Detection in Real-TIme", imageFrame)ifcv2.waitKey(10) &0xFF==ord('q'):cap.release()cv2.destroyAllWindows()break
Resultado:
As postagens do blog Acervo Lima te ajudaram? Nos ajude a manter o blog no ar!
Faça uma doação para manter o blog funcionando.
70% das doações são no valor de R$ 5,00...

Diógenes Lima da Silva