Rastreie objetos com Camshift usando OpenCV
OpenCV é a enorme biblioteca de código aberto para visão computacional, machine learning e processamento de imagens e agora desempenha um papel importante na operação em tempo real, o que é muito importante nos sistemas atuais. Ao usá-lo, pode-se processar imagens e vídeos para identificar objetos, rostos ou até mesmo a escrita de um humano.
Camshift ou podemos dizer Continuously Adaptive Meanshift é uma versão aprimorada do algoritmo de meanshift que fornece mais precisão e robustez ao modelo. Com a ajuda do algoritmo Camshift, o tamanho da janela continua atualizando quando a janela de rastreamento tenta convergir. O rastreamento é feito usando as informações de cor do objeto. Além disso, fornece a janela de rastreamento mais adequada para rastreamento de objetos. Ele aplica a diferença média primeiro e depois atualiza o tamanho da janela como:
![\ [s = 2 \ vezes \ sqrt {\ frac {M_ {00}} {256}} \]](https://www.geeksforgeeks.org/wp-content/ql-cache/quicklatex.com-8c152ed637778b42ef5ae34ce1d2ad73_l3.png)
Em seguida, ele calcula a elipse que melhor se ajusta a ele e novamente aplica o desvio médio com a janela de pesquisa recém-dimensionada e a janela anterior. Este processo continua até que a precisão exigida seja alcançada.
Observação: para obter mais informações sobre meanshift, consulte Python OpenCV: Meanshift
Abaixo está a implementação.
importnumpy as npimportcv2 as cvcap=cv.VideoCapture('sample.mp4')ret, frame=cap.read()x, y, width, height=400,440,150,150track_window=(x, y,width, height)roi=frame[y:y+height,x : x+width]hsv_roi=cv.cvtColor(roi,cv.COLOR_BGR2HSV)mask=cv.inRange(hsv_roi,np.array((0.,60.,32.)),np.array((180.,255.,255)))roi_hist=cv.calcHist([hsv_roi],[0], mask,[180],[0,180])cv.normalize(roi_hist, roi_hist,0,255, cv.NORM_MINMAX)term_crit=( cv.TERM_CRITERIA_EPS |cv.TERM_CRITERIA_COUNT,15,2)while(1):ret, frame=cap.read()frame=cv.resize(frame,(720,720),fx=0, fy=0,interpolation=cv.INTER_CUBIC)cv.imshow('Original', frame)ret1, frame1=cv.threshold(frame,180,155,cv.THRESH_TOZERO_INV)hsv=cv.cvtColor(frame1,cv.COLOR_BGR2HSV)dst=cv.calcBackProject([hsv],[0],roi_hist,[0,180],1)ret2, track_window=cv.CamShift(dst,track_window,term_crit)pts=cv.boxPoints(ret2)pts=np.int0(pts)Result=cv.polylines(frame,[pts],True,(0,255,255),2)cv.imshow('Camshift', Result)k=cv.waitKey(30) &0xffifk==27:breakcap.release()cv.destroyAllWindows()
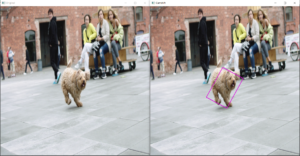
Resultado:


As postagens do blog Acervo Lima te ajudaram? Nos ajude a manter o blog no ar!
Faça uma doação para manter o blog funcionando.
70% das doações são no valor de R$ 5,00...

Diógenes Lima da Silva